This repository contains the code (in PyTorch) for the model introduced in the following paper:
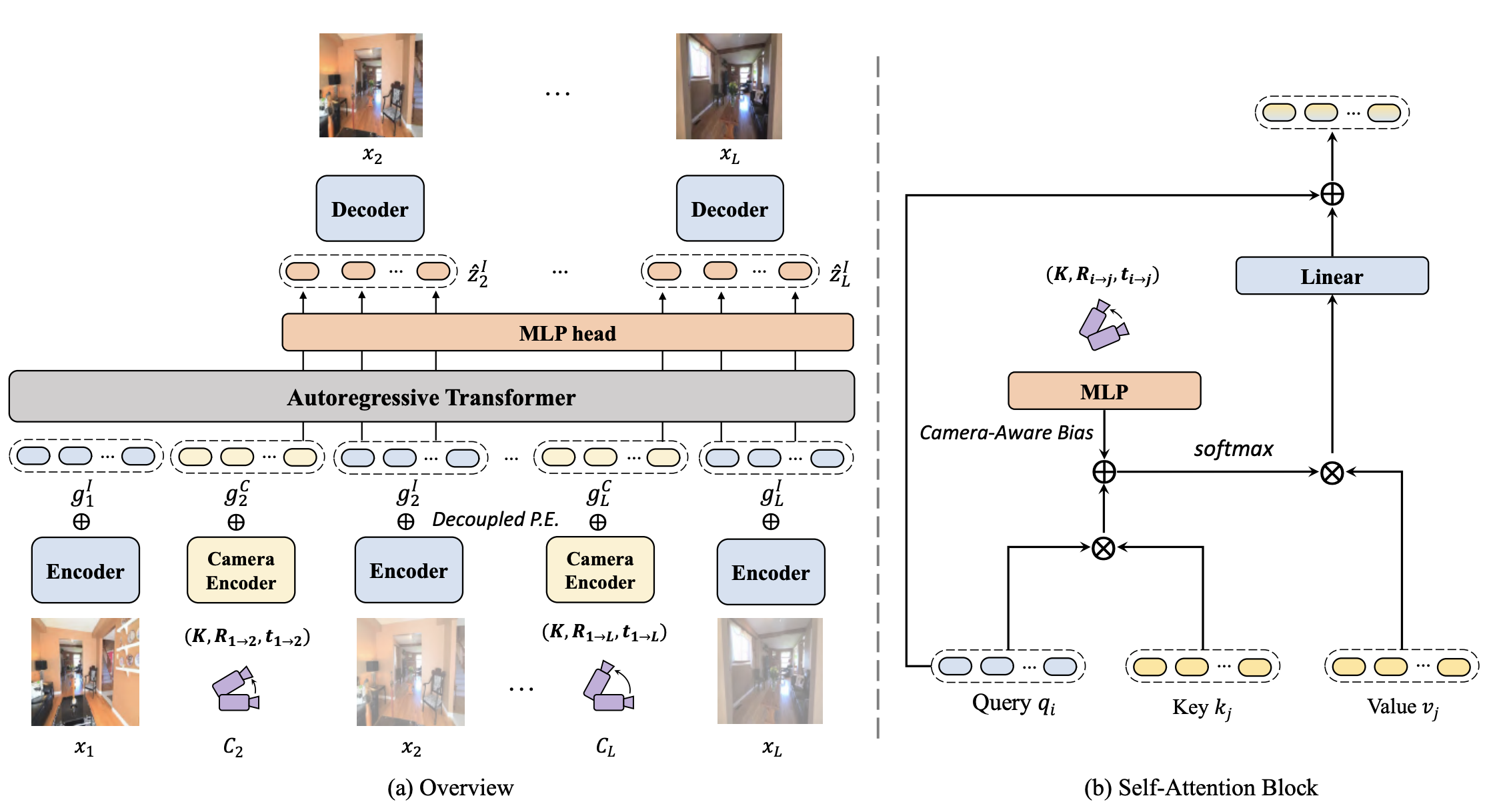
Look Outside the Room: Synthesizing A Consistent Long-Term 3D Scene Video from A Single Image
Xuanchi Ren, Xiaolong Wang
CVPR 2022
[Paper] [Project Page (Demos)] [Supplementary]

Our method can synthesize a consistent long-term 3D scene video from a single image, especially for looking outside the room.
@inproceedings{ren2022look,
title = {Look Outside the Room: Synthesizing A Consistent Long-Term 3D Scene Video from A Single Image},
author = {Ren, Xuanchi and Wang, Xiaolong},
booktitle = {CVPR},
year = {2022}
}✅ Release pretrained model for Matterport 3D
🔲 Release pretrained model for RealEstate
- Clone the repository:
git clone https://github.com/xrenaa/Look-Outside-Room
cd Look-Outside-Room
python scripts/download_vqmodels.py
- Dependencies:
conda env create -f environment.yaml
conda activate lookout
pip install opencv-python ffmpeg-python matplotlib tqdm omegaconf pytorch-lightning einops importlib-resources imageio imageio-ffmpeg numpy-quaternion
-
Quick Access: To enable quick access, we also provide some samples here (around 90G). You can download and place it under
/MP3D/test. -
Install habitat-api and habitat-sim. You need to use the following repo version (see this SynSin issue for details):
- habitat-sim: d383c2011bf1baab2ce7b3cd40aea573ad2ddf71
- habitat-api: e94e6f3953fcfba4c29ee30f65baa52d6cea716e
-
Download the models from the Matterport3D dataset and the point nav datasets. You should have a dataset folder with the following data structure:
root_folder/
mp3d/
17DRP5sb8fy/
17DRP5sb8fy.glb
17DRP5sb8fy.house
17DRP5sb8fy.navmesh
17DRP5sb8fy_semantic.ply
1LXtFkjw3qL/
...
1pXnuDYAj8r/
...
...
pointnav/
mp3d/
...
- Walk-through videos: We use a
get_action_shortest_pathfunction provided by the Habitat navigation package to generate episodes of tours of the rooms.
python scripts/create_mp3d_dataset_train.py
python scripts/create_mp3d_dataset_test.py
- Download the dataset from RealEstate10K.
- Download videos from RealEstate10K dataset, decode videos into frames. You might find the RealEstate10K_Downloader written by cashiwamochi helpful. Organize the data files into the following structure:
$ROOT/RealEstate10K
train/
0000cc6d8b108390.txt
00028da87cc5a4c4.txt
...
test/
000c3ab189999a83.txt
000db54a47bd43fe.txt
...
$ROOT/dataset
train/
0000cc6d8b108390/
52553000.jpg
52586000.jpg
...
00028da87cc5a4c4/
...
test/
000c3ab189999a83/
...
- To prepare the
$SPLITsplit of the dataset ($SPLITbeing one oftrainandtestfor RealEstate ) in$ROOT, run the following within thescriptsdirectory:
python sparse_from_realestate_format.py --txt_src ${ROOT/RealEstate10K}/${SPLIT} --img_src ${ROOT/dataset}/${SPLIT} --spa_dst ${ROOT/sparse}/${SPLIT}
- Pre-trained model (Matterport3D): Link. You can place it under
experiments/mp3d/{your_name}. - Pre-trained model (RealEstate10K) (To Do)
By default, the training scripts are designed for 4*32G GPUs. You can adjust the hyperparameters based on your machine.
- Train the mdoel:
python -m torch.distributed.launch --nproc_per_node=4 --master_port=14900 main.py --dataset mp3d --name exp_1 --base ./configs/mp3d/mp3d_16x16_sine_cview_adaptive.yaml --data-path /MP3D/train
- Finetune the model by error accumulation:
python -m torch.distributed.launch --nproc_per_node=4 --master_port=14900 error_accumulation.py --dataset mp3d --name exp_1_error --base ./configs/mp3d/mp3d_16x16_sine_cview_adaptive_error.yaml --data-path /MP3D/train
- Train the mdoel:
python -m torch.distributed.launch --nproc_per_node=4 --master_port=14900 main.py --dataset realestate --name exp_1 --base ./configs/realestate/realestate_16x16_sine_cview_adaptive.yaml --data-path $ROOT
- Finetune the model by error accumulation:
python -m torch.distributed.launch --nproc_per_node=4 --master_port=14900 error_accumulation.py --dataset realestate --name exp_1_error --base ./configs/realestate/realestate_16x16_sine_cview_adaptive_error.yaml --data-path $ROOT
Generate and evaluate the synthesis results:
python ./evaluation/evaluate_mp3d.py --len 21 --video_limit 100 --base mp3d_16x16_sine_cview_adaptive --exp exp_1_error --data-path /MP3D/test
Generate and evaluate the synthesis results:
python ./evaluation/evaluate_realestate.py --len 21 --video_limit 200 --base realestate_16x16_sine_cview_adaptive --exp exp_1_error --data-path $ROOT
This repo is mainly based on https://github.com/CompVis/geometry-free-view-synthesis.
Data generator of Matterport 3D is based on: https://github.com/facebookresearch/synsin.
Evaluation metircs are based on: https://github.com/zlai0/VideoAutoencoder.