Hardware design
This page illustrates the hardware design of the robot.
TODO: Add image
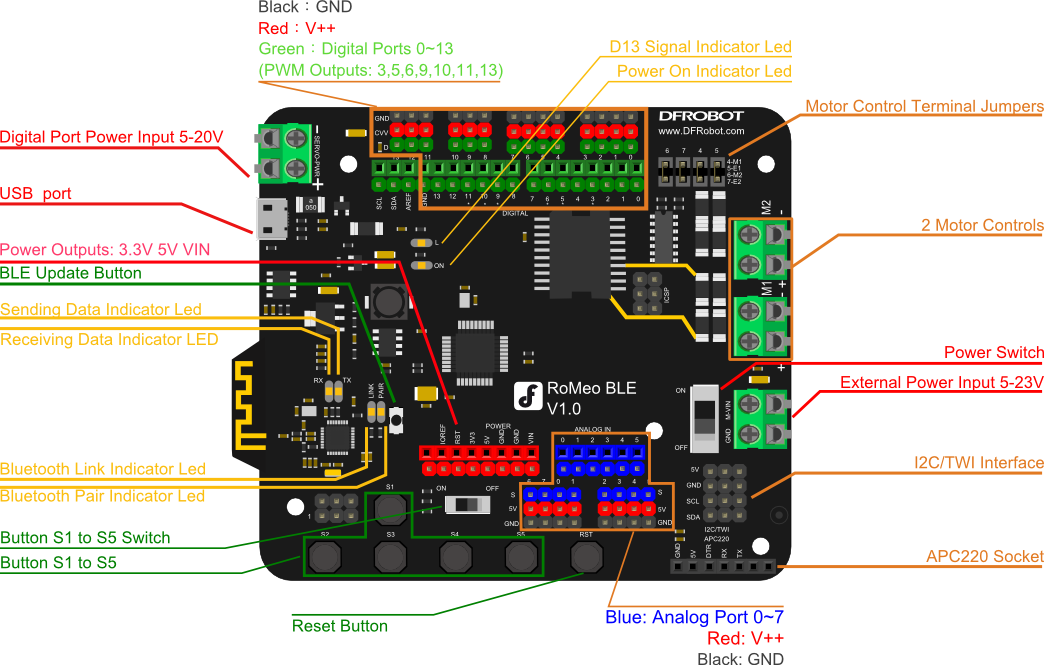
It is the core component of the robot platform.
TODO: Add image
Schematic:
Specifications:
TODO: Add diagram
TODO: Add general schematic
TODO: Add image
Specifications:
- 7.4 V 2-cell Pack
- 2200 mAh of charge
- 1 °C continuous discharge rate (5 °C Max)
- 1C : 2,2 A for 2,2 hours
- 5C : 11 A for 30 minutes
TODO: Add image
TODO: Add image
Specifications:
| Nb | Component | Voltage (V) | Nominal (mA) | Total (mA) | Pik (mA) |
|---|---|---|---|---|---|
| 1 | Arduino [1] | 5V | 25 mA | 25 mA | NA |
| 1 | Motor Shield [1] | 5V | 35 mA | 35 mA | NA |
| 2 | Motors | 6V | 1000 mA | 2000 mA | 2800 mA |
| 3 | Sharp Sensors | 5V | 30 mA | 120 mA | NA |
| 5 | QTI Line Sensors | 5V | 50 mA | 250 mA | NA |
| 1 | LCD Display | 2.7 - 5.5V | 0.6 mA | 1 mA |
- | - | - | Total: | 2431 mA | -
[1] Included in the Romeo BLE board.
Theoretical battery autonomy: ~2 hours TODO: Add measured battery autonomy
TODO: Add image
Wiring diagram:
TODO: Add diagram
TODO: Add image
Wiring diagram:
TODO: Add diagram
TODO: Add image
Wiring diagram:
TODO: Add diagram
- Battery : DFRobot SKU:FIT0137 (link) - discontinued
TODO Complete