You may also want to have a look at our follow-up work EMSANet (multi-task approach, better results for semantic segmentation, and cleaner and more extendable code base)
This repository contains the code to our paper "Efficient RGB-D Semantic Segmentation for Indoor Scene Analysis" (IEEE Xplore, arXiv).
Our carefully designed network architecture enables real-time semantic segmentation on a NVIDIA Jetson AGX Xavier and, thus, is well suited as a common initial processing step in a complex system for real-time scene analysis on mobile robots:
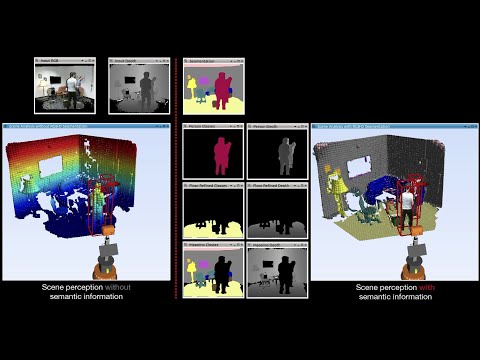
(Click on the image to open Youtube Video)
Our approach can also be applied to outdoor scenarios such as Cityscapes:
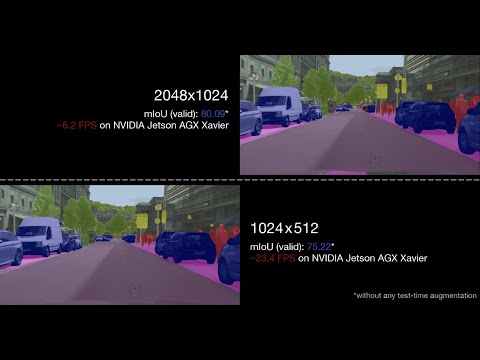
(Click on the image to open Youtube Video)
This repository contains the code for training, evaluating our networks. Furthermore, we provide code for converting the model to ONNX and TensorRT, as well as for measuring the inference time.
The source code is published under BSD 3-Clause license, see license file for details.
If you use the source code or the network weights, please cite the following paper:
Seichter, D., Köhler, M., Lewandowski, B., Wengefeld T., Gross, H.-M. Efficient RGB-D Semantic Segmentation for Indoor Scene Analysis in IEEE International Conference on Robotics and Automation (ICRA), pp. 13525-13531, 2021.
@inproceedings{esanet2021icra,
title={Efficient RGB-D Semantic Segmentation for Indoor Scene Analysis},
author={Seichter, Daniel and K{\"o}hler, Mona and Lewandowski, Benjamin and Wengefeld, Tim and Gross, Horst-Michael},
booktitle={IEEE International Conference on Robotics and Automation (ICRA)},
year={2021},
volume={},
number={},
pages={13525-13531}
}
@article{esanet2020arXiv,
title={Efficient RGB-D Semantic Segmentation for Indoor Scene Analysis},
author={Seichter, Daniel and K{\"o}hler, Mona and Lewandowski, Benjamin and Wengefeld, Tim and Gross, Horst-Michael},
journal={arXiv preprint arXiv:2011.06961},
year={2020}
}Note that the preprint was accepted to be published in IEEE International Conference on Robotics and Automation (ICRA).
-
Clone repository:
git clone https://github.com/TUI-NICR/ESANet.git cd /path/to/this/repository -
Set up anaconda environment including all dependencies:
# create conda environment from YAML file conda env create -f rgbd_segmentation.yaml # activate environment conda activate rgbd_segmentation
-
Data preparation (training / evaluation / dataset inference):
We trained our networks on NYUv2, SUNRGB-D, and Cityscapes. The encoders were pretrained on ImageNet. Furthermore, we also pretrained our best model on the synthetic dataset SceneNet RGB-D.The folder
src/datasetscontains the code to prepare NYUv2, SunRGB-D, Cityscapes, SceneNet RGB-D for training and evaluation. Please follow the instructions given for the respective dataset and store the created datasets in./datasets. For ImageNet, we used TensorFlowDatasets (seeimagenet_pretraining.py). -
Pretrained models (evaluation):
We provide the weights for our selected ESANet-R34-NBt1D (with ResNet34 NBt1D backbones) on NYUv2, SunRGBD, and Cityscapes:Dataset Model mIoU FPS* URL NYUv2 (test) ESANet-R34-NBt1D 50.30 29.7 Download ESANet-R34-NBt1D (pre. SceneNet) 51.58 29.7 Download SUNRGB-D (test) ESANet-R34-NBt1D 48.17 29.7** Download ESANet-R34-NBt1D (pre. SceneNet) 48.04 29.7** Download Cityscapes (valid half) ESANet-R34-NBt1D 75.22 23.4 Download Cityscapes (valid full) ESANet-R34-NBt1D 80.09 6.2 Download Download and extract the models to
./trained_models.*We report the FPS for NVIDIA Jetson AGX Xavier (Jetpack 4.4, TensorRT 7.1, Float16).
**Note that we only reported the inference time for NYUv2 in our paper as it has more classes than SUNRGB-D. Thus, the FPS for SUNRGB-D can be slightly higher (37 vs. 40 classes).
There are subsection for different things to do:
- Evaluation: Reproduce results reported in our paper.
- Dataset Inference: Apply trained model to samples from dataset.
- Sample Inference: Apply trained model to samples in
./samples. - Time Inference: Time inference on NVIDIA Jetson AGX Xavier using TensorRT.
- Training: Train new ESANet model.
To reproduce the mIoUs reported in our paper, use eval.py.
Note that building the model correctly depends on the respective dataset the model was trained on. Passing no additional model arguments to
eval.pydefaults to evaluating our ESANet-R34-NBt1D either on NYUv2 or SUNRGB-D. For Cityscapes the parameters differ. You will find aargsv_*.txtfile next to the network weights listing the required arguments.
Examples:
-
To evaluate our ESANet-R34-NBt1D trained on NYUv2, run:
python eval.py \ --dataset nyuv2 \ --dataset_dir ./datasets/nyuv2 \ --ckpt_path ./trained_models/nyuv2/r34_NBt1D.pth # Camera: kv1 mIoU: 50.30 # All Cameras, mIoU: 50.30 -
To evaluate our ESANet-R34-NBt1D trained on SUNRGB-D, run:
python eval.py \ --dataset sunrgbd \ --dataset_dir ./datasets/sunrgbd \ --ckpt_path ./trained_models/sunrgbd/r34_NBt1D.pth # Camera: realsense mIoU: 32.42 # Camera: kv2 mIoU: 46.28 # Camera: kv1 mIoU: 53.39 # Camera: xtion mIoU: 41.93 # All Cameras, mIoU: 48.17 -
To evaluate our ESANet-R34-NBt1D trained on Cityscapes, run:
# half resolution (1024x512) python eval.py \ --dataset cityscapes-with-depth \ --dataset_dir ./datasets/cityscapes \ --ckpt_path ./trained_models/cityscapes/r34_NBt1D_half.pth \ --height 512 \ --width 1024 \ --raw_depth \ --context_module appm-1-2-4-8 # Camera: camera1 mIoU: 75.22 # All Cameras, mIoU: 75.22 # full resolution (2048x1024) # note that the model is created and was trained on half resolution, only # the evalution is done using full resolution python eval.py \ --dataset cityscapes-with-depth \ --dataset_dir ./datasets/cityscapes \ --ckpt_path ./trained_models/cityscapes/r34_NBt1D_full.pth \ --height 512 \ --width 1024 \ --raw_depth \ --context_module appm-1-2-4-8 \ --valid_full_res # Camera: camera1 mIoU: 80.09 # All Cameras, mIoU: 80.09
We provide scripts for inference on both sample input images
(inference_samples.py) and samples drawn from one of our used datasets
(inference_dataset.py).
Note that building the model correctly depends on the respective dataset the model was trained on. Passing no additional model arguments to
eval.pydefaults to evaluating our ESANet-R34-NBt1D either on NYUv2 or SUNRGB-D. For Cityscapes the parameters differ. You will find aargsv_*.txtfile next to the network weights listing the required arguments for Cityscapes.
Use inference_dataset.py to apply a trained model to samples drawn from one of
our used datasets:
Example: To apply ESANet-R34-NBt1D trained on SUNRGB-D to samples from SUNRGB-D, run:
# note that the entire first batch is visualized, so larger batch sizes results
# in smaller images in the plot
python inference_dataset.py \
--dataset sunrgbd \
--dataset_dir ./datasets/sunrgbd \
--ckpt_path ./trained_models/sunrgbd/r34_NBt1D_scenenet.pth \
--batch_size 4Use inference_samples.py to apply a trained model to the samples given in
./samples.
Note that the dataset argument is required to determine the correct preprocessing and the class colors. However, you do not need to prepare the respective dataset. Furthermore, depending on the given depth images and the used dataset for training, an additional depth scaling might be necessary.
Examples:
-
To apply our ESANet-R34-NBt1D trained on SUNRGB-D to the samples, run:
python inference_samples.py \ --dataset sunrgbd \ --ckpt_path ./trained_models/sunrgbd/r34_NBt1D.pth \ --depth_scale 1 \ --raw_depth
-
To apply our ESANet-R34-NBt1D trained on NYUv2 to the samples, run:
python inference_samples.py \ --dataset nyuv2 \ --ckpt_path ./trained_models/nyuv2/r34_NBt1D.pth \ --depth_scale 0.1 \ --raw_depth


We timed the inference on a NVIDIA Jetson AGX Xavier with Jetpack 4.4 (TensorRT 7.1.3, PyTorch 1.4.0).
Reproducing the timings on a NVIDIA Jetson AGX Xavier with Jetpack 4.4 further requires:
- the PyTorch 1.4.0 wheel from NVIDIA Forum
- the NVIDIA TensorRT Open Source Software (
onnx2trtis used to convert the onnx model to a TensorRT engine) - the requirements listed in
requirements_jetson.txt:pip3 install -r requirements_jetson.txt --user
Subsequently, you can run inference_time.sh to reproduce the reported timings
for ESANet.
The inference time of a single model can be computed with
inference_time_whole_model.py.
Example: To reproduce the timings of our ESANet-R34-NBt1D trained on NYUv2, run:
python3 inference_time_whole_model.py \
--dataset nyuv2 \
--no_time_pytorch \
--no_time_onnxruntime \
--trt_floatx 16Note that a Jetpack version earlier than 4.4 fails completely or results in deviating outputs due to differently handled upsampling.
To reproduce the timings of other models we compared in our paper to, follow the instructions given in src/models/external_code.
Use train.py to train ESANet on NYUv2, SUNRGB-D, Cityscapes, or SceneNet RGB-D
(or implement your own dataset by following the implementation of the provided
datasets).
The arguments default to training ESANet-R34-NBt1D on NYUv2 with the
hyper-parameters from our paper. Thus, they could be omitted but are presented
here for clarity.
Note that training ESANet-R34-NBt1D requires the pretrained weights for the encoder backbone ResNet-34 NBt1D. You can download our pretrained weights on ImageNet from Link. Otherwise, you can use
imagenet_pretraining.pyto create your own pretrained weights.
Examples:
-
Train our ESANet-R34-NBt1D on NYUv2 (except for the dataset arguments, also valid for SUNRGB-D):
# either specify all arguments yourself python train.py \ --dataset nyuv2 \ --dataset_dir ./datasets/nyuv2 \ --pretrained_dir ./trained_models/imagenet \ --results_dir ./results \ --height 480 \ --width 640 \ --batch_size 8 \ --batch_size_valid 24 \ --lr 0.01 \ --optimizer SGD \ --class_weighting median_frequency \ --encoder resnet34 \ --encoder_block NonBottleneck1D \ --nr_decoder_blocks 3 \ --modality rgbd \ --encoder_decoder_fusion add \ --context_module ppm \ --decoder_channels_mode decreasing \ --fuse_depth_in_rgb_encoder SE-add \ --upsampling learned-3x3-zeropad # or use the default arguments python train.py \ --dataset nyuv2 \ --dataset_dir ./datasets/nyuv2 \ --pretrained_dir ./trained_models/imagenet \ --results_dir ./results
-
Train our ESANet-R34-NBt1D on Cityscapes:
# note that the some parameters are different python train.py \ --dataset cityscapes-with-depth \ --dataset_dir ./datasets/cityscapes \ --pretrained_dir ./trained_models/imagenet \ --results_dir ./results \ --raw_depth \ --he_init \ --aug_scale_min 0.5 \ --aug_scale_max 2.0 \ --valid_full_res \ --height 512 \ --width 1024 \ --batch_size 8 \ --batch_size_valid 16 \ --lr 1e-4 \ --optimizer Adam \ --class_weighting None \ --encoder resnet34 \ --encoder_block NonBottleneck1D \ --nr_decoder_blocks 3 \ --modality rgbd \ --encoder_decoder_fusion add \ --context_module appm-1-2-4-8 \ --decoder_channels_mode decreasing \ --fuse_depth_in_rgb_encoder SE-add \ --upsampling learned-3x3-zeropad
For further information, use python train.py --help or take a look at
src/args.py.
To analyze the model structure, use
model_to_onnx.pywith the same arguments to export an ONNX model file, which can be nicely visualized using Netron.