原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning
[TOC]
rnx2rtkp [option ...] file file [...]
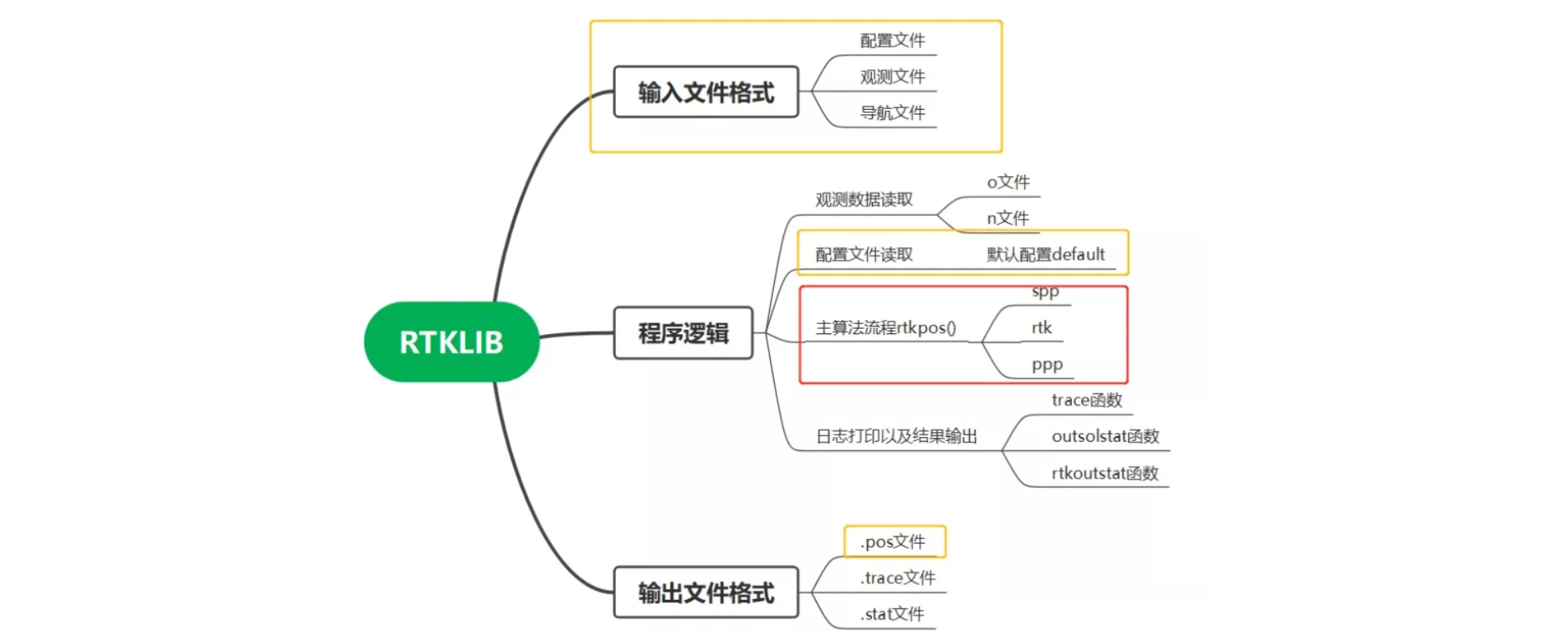
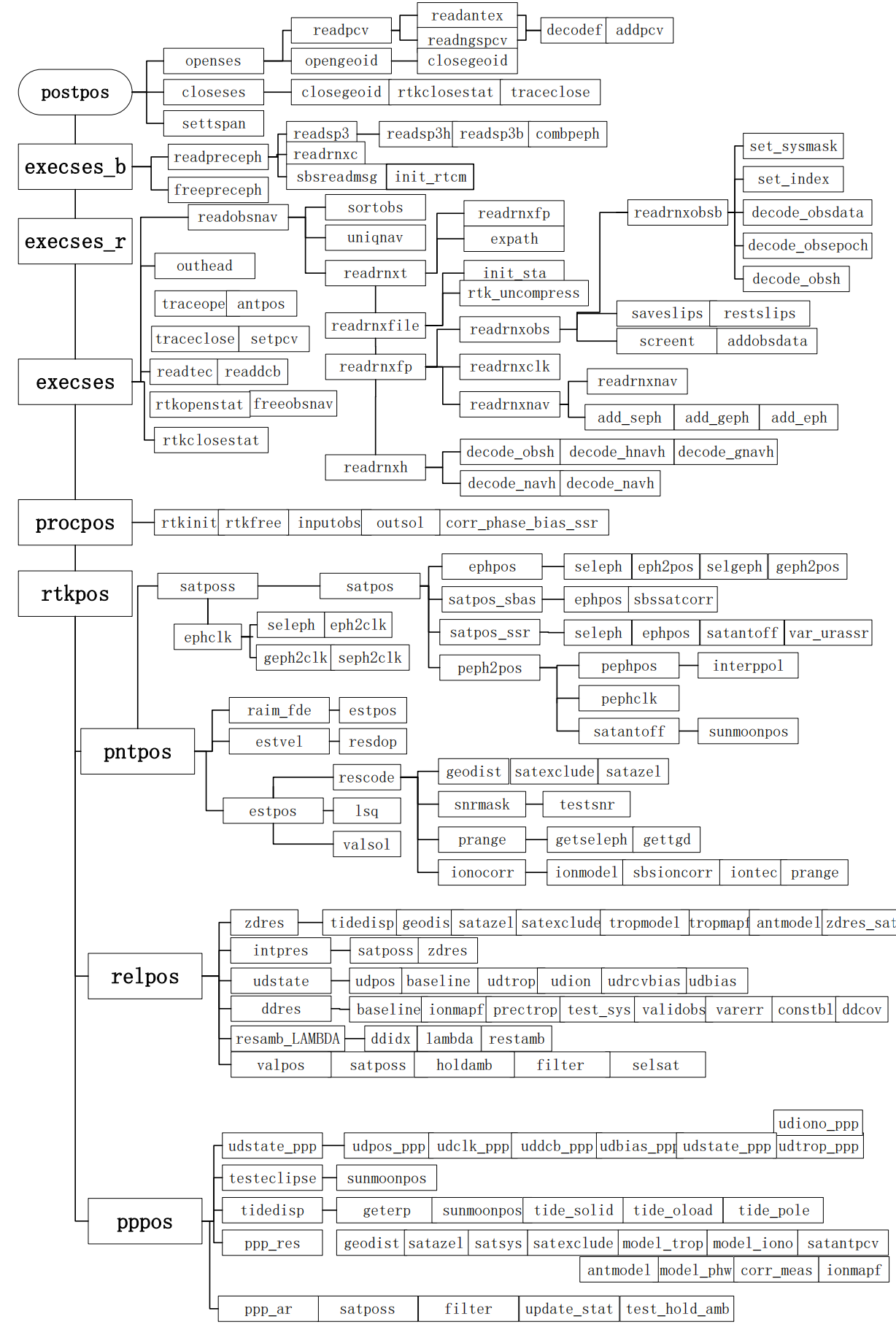
rnx2rtkp 全称 RINEX to RTK pos,通过原始 RINEX 文件,输出 RTKLIB 的定位坐标,下图可以很好的表示整个程序的逻辑:
- 使用方式:
rnx2rtkp [option]... file file [...] - 读取 RINEX:OBS/NAV/GNAV/HNAV/CLK, SP3, SBAS 等文件,计算接收机、流动站坐标,并输出结果。
- 对于相对定位,第一个 OBS 观测值文件需含接收机、流动站观测值,第二个 OBS 文件需含基准站观测值。
- 输入文件至少要有一个星历文件,RINEX NAV/GNAV/HNAV 。
- 想用 SP3 精密星历文件,需提供 .sp3/.eph 文件的路径。
- 输入文件路径可包含通配符 *,为了防止与命令行命令冲突,要用
"..."括起带通配符符路径。
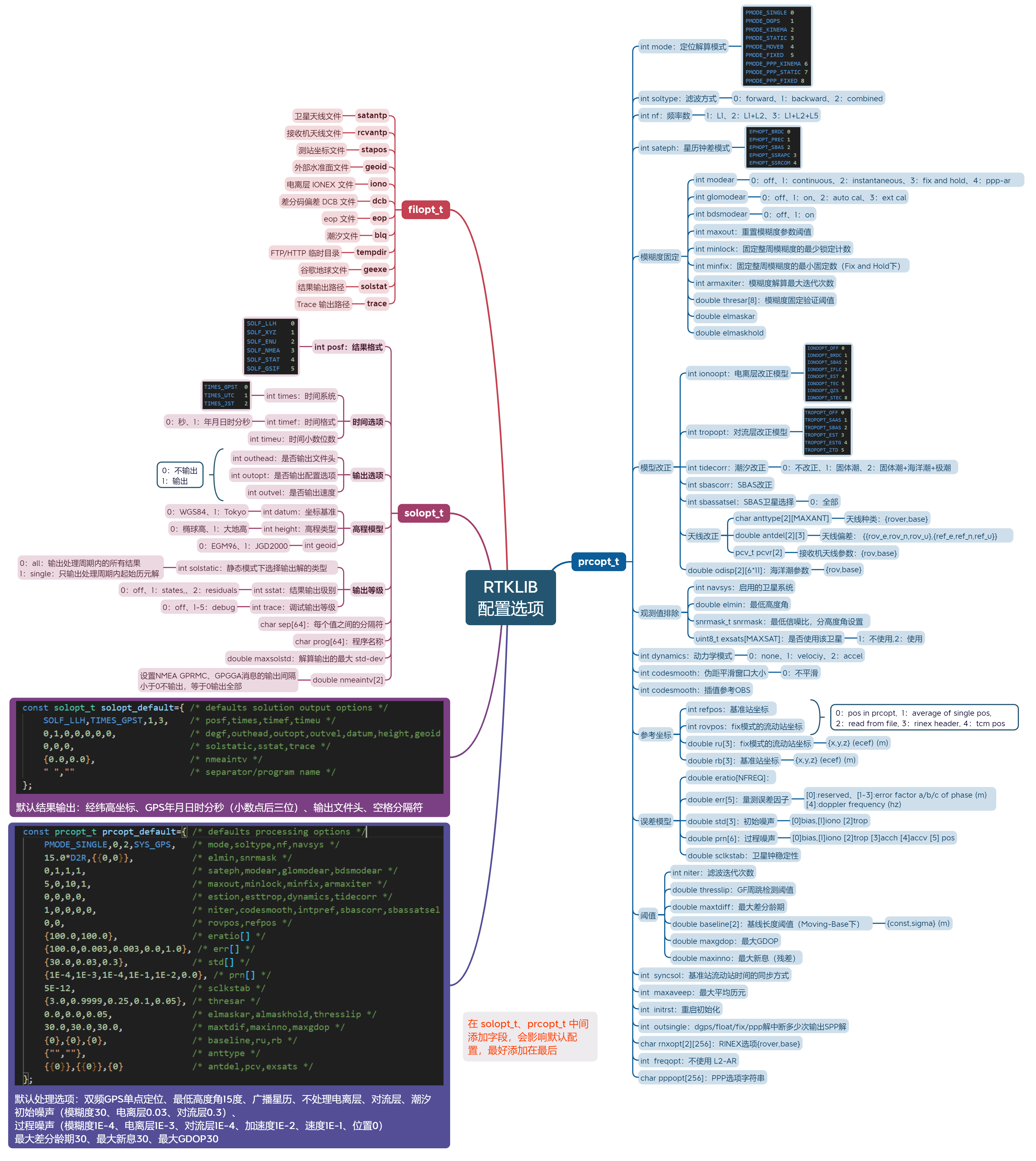
filopt_t:文件选项,存结果输出、Trace、各种改正文件路径,不包括星历文件和观测文件。solopt_t:结果选项,可以设置结果输出形式(ENU、ECEF、NMEA、BLH),小数位数,是否输出文件头,是否输出速度等。prcopt_t:处理选项,是配置的重头戏,可以先看 postpos 的用法 学习界面程序的配置方式。写代码配置和界面程序需要配置的东西是一样的,只是从在界面上选,换成在了代码里给对应字段赋值,或者在配置文件中设置。
- -?:打印 help
- -k file:配置文件的输入选项,默认值是 [off]
- -o file:输出文件选项,默认值是 [stdout]
- -ts ds ts:设置开始解算时间
(ds=y/m/d ts=h:m:s),默认值是 [obs start time] - -te de ds:设置结束解算时间
(de=y/m/d te=h:m:s),默认值是 [obs end time] - -ti tint:设置解算时间间隔频率
(sec),默认值是[all] - -p mode:设置解算模式,(0:single,1:dgps,2:kinematic,3:static,4:moving-base,5:fixed,6:ppp-kinematic,7:ppp-static),默认值是 [2]
- -m mask:设置截止高度角,
(deg),默认值是 [15] - -sys s:设置用于计算的导航系统,
(s=G:GPS,R:GLO,E:GAL,J:QZS,C:BDS,I:IRN),默认值是 [G|R] ,想用除 GPS 以外的系统,还得加宏定义 ENAGLO、ENACMP、ENAGAL - -f freq:设置用于计算的频率,
(1:L1,2:L1+L2,3:L1+L2+L5),默认值是 [2] - -v thres:设置整周模糊度 Ratio 值,写 0.0 为不固定整周模糊度,默认值是 [3.0]
- -b:后向滤波
- -c:前后向滤波组合
- -i:单历元模糊度固定 instantaneous
- -h:fix and hold 模糊度固定
- -e:输出 XYZ-ecef 坐标
- -a:输出 ENU-baseline
- -n:输出 NMEA-0183 GGA
- -g:输出经纬度格式为 ddd mm ss.ss ,默认为 [ddd.ddd]
- -t:输出时间格式为 yyyy/mm/dd hh:mm:ss.ss ,默认为 [sssss.ss]
- -u:输出为 UTC 时间,默认为 [gpst]
- -d col:设置时间的小数位数,默认为 [3]
- -s sep:设置文件分隔符,要写在单引号中,默认为 [' ']
- -r x y z:基站位置 ECEF-XYZ (m),默认 [average of single pos] ,流动站位置用于 fixed 模式
- -l lat lon hgt:基站位置 LLH (deg/m),默认 [average of single pos],流动站位置用于 fixed模式
- -y level:输出结果信息 (0:off,1:states,2:residuals) ,默认为 [0]
- -x level:输出 debug trace 等级,默认为 [0]

str2str -in stream[#...] -out stream[#...] [-out stream[#...]...] [options]
OPTIONS
-in stream[#format] input stream path and format
-out stream[#format] output stream path and format
从数据流中输入数据,并将其分割和输出到多个数据流中,输入流可以是串行、tcp 客户端、tcp 服务器、ntrip 客户端或文件。输出流可以是串行、tcp 客户端、tcp 服务器、ntrip 服务器或文件。str2str 是常驻应用程序。要停止它:
- 如果运行在前台,则在控制台中键入 ctr-c;
- 如果运行在后台,则向后台进程发送 SIGINT 信号。
如果输入流和输出流都遵循 #format 输入信息的格式将被转换为输出格式。要指定输出使用 -msg 选项。如果省略选项 -in 或 -out,则输入为 stdin,"... "输出为 stdout、输入使用stdin,输出使用 stdout。如果选项 -in 或 -out 中的流为空,也会使用 stdin 或 stdout
使用方法:str2str [-in stream] [-out stream [-out stream...]] [options]
-
数据流路径:
serial : serial://port[:brate[:bsize[:parity[:stopb[:fctr]]]]] tcp server : tcpsvr://:port tcp client : tcpcli://addr[:port] ntrip client : ntrip://[user[:passwd]@]addr[:port][/mntpnt] ntrip server : ntrips://[:passwd@]addr[:port]/mntpnt[:str] (only out) ntrip caster : ntripc://[user:passwd@][:port]/mntpnt[:srctbl] (only out) file : [file://]path[::T][::+start][::xseppd][::S=swap]
-
数据格式:
rtcm2 : RTCM 2 (only in) rtcm3 : RTCM 3 nov : NovAtel OEMV/4/6,OEMStar (only in) oem3 : NovAtel OEM3 (only in) ubx : ublox LEA-4T/5T/6T (only in) ss2 : NovAtel Superstar II (only in) hemis : Hemisphere Eclipse/Crescent (only in) stq : SkyTraq S1315F (only in) javad : Javad (only in) nvs : NVS BINR (only in) binex : BINEX (only in) rt17 : Trimble RT17 (only in) sbf : Septentrio SBF (only in)
-
选项:
-sta sta 测站 ID -opt opt receiver dependent options -s msec timeout time (ms) [10000] -r msec reconnect interval (ms) [10000] -n msec nmea request cycle (m) [0] -f sec file swap margin (s) [30] -c file input commands file [no] -c1 file output 1 commands file [no] -c2 file output 2 commands file [no] -c3 file output 3 commands file [no] -c4 file output 4 commands file [no] -p lat lon hgt station position (latitude/longitude/height) (deg,m) -px x y z station position (x/y/z-ecef) (m) -a antinfo antenna info (separated by ,) -i rcvinfo receiver info (separated by ,) -o e n u antenna offset (e,n,u) (m) -l local_dir ftp/http local directory [] -x proxy_addr http/ntrip proxy address [no] -b str_no relay back messages from output str to input str [no] -t level trace level [0] -fl file log file [str2str.trace] -h print help
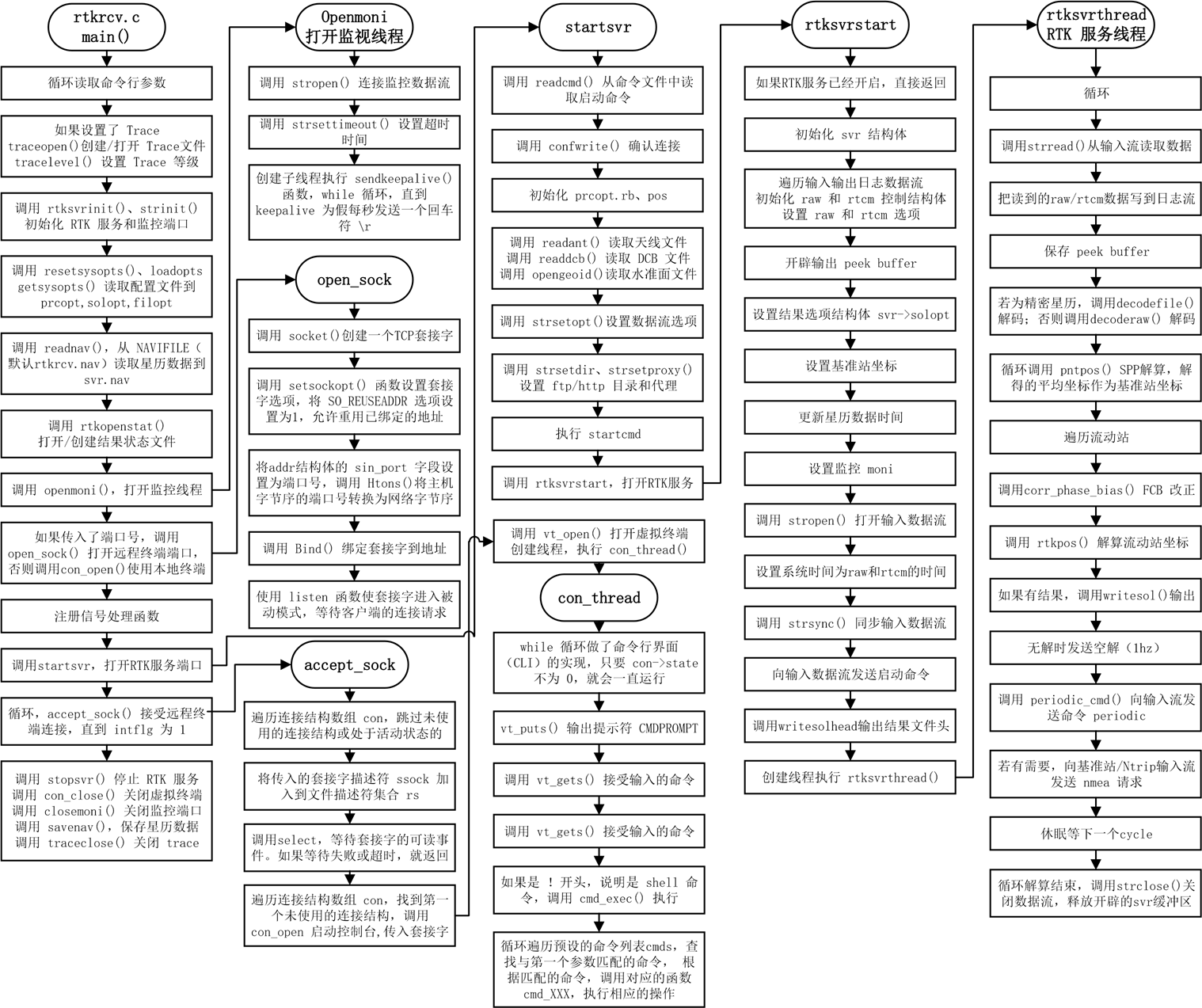
rtkrcv [-s][-p port|-d dev][-o file][-t level]
在一台电脑上开 rtkrcv 实时定位解算,然后可以用另一台电脑通过 IP 地址和端口号连接,
-
`-s`:程序启动的时候开启 RTK 定位解算。 -
`-p port`:远程终端的端口号。 -
`-m port`:远程监控的端口号。 -
`-d dev`:终端设备。 -
`-o file`:处理选项文件,与 RNX2RTKP 相同,可以在界面程序 RTKPOST、RTKNAVI 上设置然后导出。 -
`-w pwd`:远程终端连接密码 ("": 无密码)。 -
`-r level`:输出解算状态文件 (0:off,1:states,2:residuals)。 -
`-t level`:Trace 调试级别 (0:off,1-5:on)。 -
`-sta sta`:接收机测站名。
start:开启实时解算,如果程序执行时传入了 -s 参数就不需要再用这个命令。stop:停止定位解算。restart:重启定位解算,如果处理选项重新设置了,发送这个命令使能新选项。- 输出命令:如果不加 cycle 就是只输出一个结果,加了 cycle 就是按指定频率输出。
solution [cycle]:输出实时定位结果。status [cycle]:输出解算状态。satellite [-n] [cycle]:输出卫星状态。observ [-n] [cycle]:输出观测数据。navidata [cycle]:输出星历数据。stream [cycle]:输出数据流状态。
error:输出错误和警告信息,Ctrl-C 停止。option [opt]:输出处理选项,如果不跟 opt 就输出所有选项,加了 opt 就输出指定选项。set opt [val]:Save current processing optons to file. Without option, default file rtkrcv.conf is used.load [file]:导入处理选项文件,如果不加选项文件路径,默认读取 rtkrcv.conf;restart 重启定位解算来启用新的处理选项。save [file]:保存当前处理选项到文件,如果不加文件路径,默认存到 rtkrcv.conf。log [file|off]:log file 存下终端的 log 到文件,log off 停止记录。help|? [path]:输出命令列表,exit:退出终端连接,不影响定位解算解算。shutdown:停止定位解算,退出程序。!command [arg...]:执行操作系统的 shell 命令,不能使用需要交互的命令。
convbin [-ts y/m/d h:m:s] [-te y/m/d h:m:s] [-ti tint] [-r format] [-ro opts]
[-f freq] [-hc comment] [-hm marker] [-hn markno] [-ht marktype]
[-ho observ] [-hr rec] [-ha ant] [-hp pos] [-hd delta] [-v ver] [-od]
[-os] [-x sat] [-y sys] [-d dir] [-c satid] [-o ofile] [-n nfile]
[-g gfile] [-h hfile] [-q qfile] [-s sfile] file pos2kml [option ...] file [...]