建立工作空间出错 #2
Comments
|
这个问题是node程序对于vfly_pose这个msg是有依赖的,但是编译的时候可能没有先编译vfly_pose,解决办法是将node注释,先编译一遍,然后再把node取消注释进行编译。 |
|
具体说就是CMakeLists文件的48到62行注释掉先编译一遍,然后取消注释编译完整的package |
|
|

|
太感谢,我现在试试 |
|
您好,刚刚按照您的方法第一次编译已经成功了,但是第二次编译还是出一个问题,请问这个该怎么解决呢?
|

|
请问你用的是Ubuntu16.04吗?这个问题我在用Ubuntu16.04也遇到过,转到18.04就没有遇到过了 |
|
对的,18.04 ros版本不一样,我是初学者,所以是严格按照教程来的 |
|
您好,请问18.04 是否安装好ros-melodic-desktop-full后就可以对这个进行仿真呢?需要再下载其他库文件么 |
|
需要配置Rotors的开发环境 https://github.com/ethz-asl/rotors_simulator |
|
您好,18.04的rotors已经配置好了,但是catkin build依然会报很多错误,因为相对于16.04,18.04 中kentic变为了melodic,所以很多库文件找不到相应版本,请问您当时是怎么解决的呢? |
|
你把报的错误贴一下我看看 |
|
实在是麻烦了 |

|
没事,一步一步来吧,正好做个记录其他人也可以参考 |
|
嗯嗯,非常感谢,现在已经成功编译大部分了。那我也贡献一点吧。一些常见的错误可以在这个链接里面找到:https://www.codeleading.com/article/4849766453/ |

|
试试 |
|
全部编译成功了,太谢谢了,我现在再来试试把vfly引入 |
|
您好,不知道为什么还是会出现这个错误 |

|
你有下载adrc_control那个包吗 |
|
这个是已经下载了的 |

|
这样,你另外初始化一个工作空间,把vfly和adrc_control移过去,用catkin_make编译 |
|
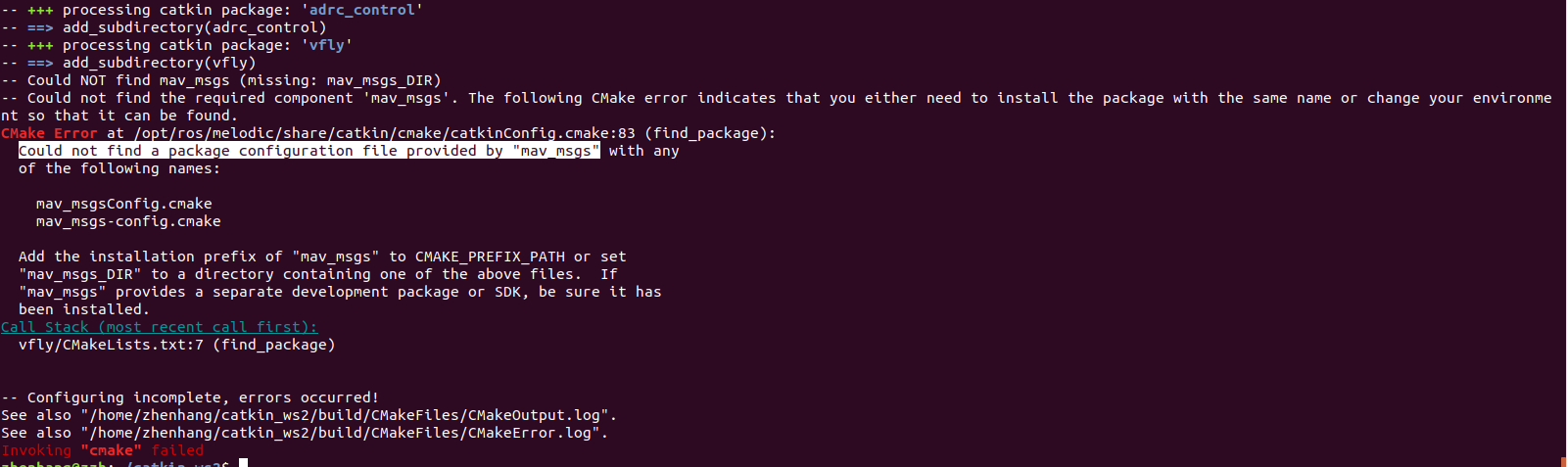
您好,已经建好了,出现了这个错误,是不是因为少装了一个库呢? |
|
你的cakin_ws工作空间编译通过了没,如果通过了的话,试试 |
|
您好,catkin_ws工作空间错误还是在,但是我在catkin_ws2用再编译一次,它的编译结果是没有问题的。 |


|
你要把catkin_ws工作空间的vfly和adrc_control删掉吧 |
|
您好,删掉以后编译是可以成功的,但是之后的话,我应该在哪个空间安装这两个文件呢? |

|
就是vfly和adrc_control在你的caykin_ws2工作空间里,编译通过的话就可以运行样例了 |
|
因为vfly和adrc_control是需要用cakin_make编译的,你的第一个工作空间用catkin build编译以后就智能用cakin build编译,所以需要单独给vfly和adrc_control一个工作空间 |
|
哦哦,懂了,我之前第二个工作空间的里面只放了vfly和adrc_control两个包,所以刚刚试着跑仿真器出不来,我现在建了第三个工作空间,把另外的19个包和vfly一块放进去用catkin_make编译了。真的 |
|
您好,我再在第三个空间里面用catkin_make还是出现那个错误 |

|
您好,我刚刚查了一下,似乎是编译的时候,没有产生omni_pid_controller_node |


|
你把你的工作空间里都有哪些包贴一下 |
|
您好,catkin_make编译会失败,系统提示我用的catkin_make_isolated。好的 |

|
现在还是有问题吗 |
|
这是工作空间里面的包 |

|
对的,还是同样的错误,我也在查是怎么回事 |
|
我刚看了一下,我的libadrc,so文件和libpid.so文件是在~/lkw_ws/devel/lib文件夹下的 |
|
我看了一下,我的devel_isolated底下都没有lib库,lib在devel文件夹下面,我明天再试试重新建空间然后再catkin_make吧,我这边已经半夜三点多了,得睡了,今天真的谢谢了 |
|
对了。我的devel下面得lib也是空的,特奇怪。之前那两个.so文件应该是我在catkin_ws3w文件夹下运行ln -s libadrc.so libadrc.so和ln -s libpid.so libpid.so生成的 |
|
原来你在国外啊,我之前还在想为啥你换到Ubuntu18.04配置开发环境那么快,国内搞这个的网速堪忧 |
|
@LLlkaiwen @ivanzzh 您好,我遇到了和ivanzzh同学同样的问题。我的系统是18.04,最后也新建了workspace用catkin_make重新编译,结果和ivanzzh同学的报错完全一致。不知道现在这个问题是否已被解决?能否分享一下最终的解决方案?万分感谢! |
|
这个我问题主要是因为在编译链接的时候找不到libadrc.so文件和libpid.so文件导致的,我现在的解决办法是把这两个文件的地址添加进来,在我的电脑里,编译完adrc_control包之后,这两个文件是在~/catkin_ws/devel/lib下的,所以我在vfly/CMakeLists.txt文件的40行添加了 |
|
万分感谢大佬!!谢谢!!
…---原始邮件---
发件人: "KaiWenLu"<[email protected]>
发送时间: 2020年3月31日(周二) 晚上8:13
收件人: "LLlkaiwen/vfly"<[email protected]>;
抄送: "Comment"<[email protected]>;"Ruoqiao Guan"<[email protected]>;
主题: Re: [LLlkaiwen/vfly] 建立工作空间出错 (#2)
这个我问题主要是因为在编译链接的时候找不到libadrc.so文件和libpid.so文件导致的,我现在的解决办法是把这两个文件的地址添加进来,在我的电脑里,编译完adrc_control包之后,这两个文件是在~/catkin_ws/devel/lib下的,所以我在vfly/CMakeLists.txt文件的40行添加了
link_directories( ~/catkin_ws/devel/lib )
—
You are receiving this because you commented.
Reply to this email directly, view it on GitHub, or unsubscribe.
|
|
可以了吗
…------------------ 原始邮件 ------------------
发件人: "Ruoqiao Guan"<[email protected]>;
发送时间: 2020年3月31日(星期二) 晚上8:50
收件人: "LLlkaiwen/vfly"<[email protected]>;
抄送: "卢凯文"<[email protected]>;"Mention"<[email protected]>;
主题: Re: [LLlkaiwen/vfly] 建立工作空间出错 (#2)
万分感谢大佬!!谢谢!!
---原始邮件---
发件人: "KaiWenLu"<[email protected]&gt;
发送时间: 2020年3月31日(周二) 晚上8:13
收件人: "LLlkaiwen/vfly"<[email protected]&gt;;
抄送: "Comment"<[email protected]&gt;;"Ruoqiao Guan"<[email protected]&gt;;
主题: Re: [LLlkaiwen/vfly] 建立工作空间出错 (#2)
这个我问题主要是因为在编译链接的时候找不到libadrc.so文件和libpid.so文件导致的,我现在的解决办法是把这两个文件的地址添加进来,在我的电脑里,编译完adrc_control包之后,这两个文件是在~/catkin_ws/devel/lib下的,所以我在vfly/CMakeLists.txt文件的40行添加了
link_directories( ~/catkin_ws/devel/lib )
—
You are receiving this because you commented.
Reply to this email directly, view it on GitHub, or unsubscribe.
—
You are receiving this because you were mentioned.
Reply to this email directly, view it on GitHub, or unsubscribe.
|
您好,我在下载好vfly文件后,对工作空间初始化时,遇到了以下错误,这里似乎缺失了一个vfly_pose.h的文件,请问这个问题该如何解决呢?

Errors << vfly:make /home/zhenhang/catkin_ws/logs/vfly/build.make.000.log
/home/zhenhang/catkin_ws/src/vfly/src/rotation_on_fixed_spot_example.cpp:3:27: fatal error: vfly/vfly_pose.h: No such file or directory
compilation terminated.
/home/zhenhang/catkin_ws/src/vfly/src/move_with_zero_attitude_example.cpp:3:27: fatal error: vfly/vfly_pose.h: No such file or directory
compilation terminated.
make[2]: *** [CMakeFiles/rotation_on_fixed_spot_example.dir/src/rotation_on_fixed_spot_example.cpp.o] Error 1
make[1]: *** [CMakeFiles/rotation_on_fixed_spot_example.dir/all] Error 2
make[1]: *** Waiting for unfinished jobs....
make[2]: *** [CMakeFiles/move_with_zero_attitude_example.dir/src/move_with_zero_attitude_example.cpp.o] Error 1
make[1]: *** [CMakeFiles/move_with_zero_attitude_example.dir/all] Error 2
In file included from /home/zhenhang/catkin_ws/src/vfly/src/omni_adrc_controller_node.cpp:1:0:
/home/zhenhang/catkin_ws/src/vfly/include/omni_adrc_controller_node.h:14:28: fatal error: vfly/vfly_pose.h: No such file or directory
compilation terminated.
make[2]: *** [CMakeFiles/omni_adrc_controller_node.dir/src/omni_adrc_controller_node.cpp.o] Error 1
make[1]: *** [CMakeFiles/omni_adrc_controller_node.dir/all] Error 2
make: *** [all] Error 2
The text was updated successfully, but these errors were encountered: